Ok, yeah, it’s been a while since doing updates. What can I say, got busy with other things. Also apparently had to fix some issues with plugins that caused the site not to work properly. Back to trying to do some updates on things. First, we’ll start with some more theater reviews because shows have FINALLY started happening again.
What we watch
As the first step of what we should do, I started building a list of what programs on TV we watch. That was a little disturbing in places, because apparently we’re “those people” that keep all the CBS shows on the air. It actually worked out that a very large chunk of what we watch is on CBS. Then we have a few programs on NBC, one program on ABC (that I’d actually picked up a season pass on Amazon for when they “mistakenly” listed the price before the season started), a couple on FOX, and a number of programs on some of the various cable channels out there. And then there’s the ugly duckling in the room: sports. As far as I can tell, sports is the bane of the cord cutters ambitions to save money. I figure that from things I watch, I pretty much need access to ESPN, Fox Sports, the Fox Sports local, Big 10 network, and NBC Sports. Maybe sometimes CBS sports, but not anywhere near as common. And as far as I can tell, you can’t get them without subscribing to one of the various live tv streaming services out there. Which means that instead of being able to get something like the Hulu plan that just includes on-demand content, now I’m looking at having to get their full hulu tv service. Their ad-free service is something like $12/month. Their Hulu TV service with ad-free on-demand is something like $51/month. Yikes. Suddenly I’m back to dealing with what’s effectively a cable company in different clothes, and any chance of actually saving money on this process is rapidly headed out the window.
Origins of my desire to cut the cord
So, for a long time, I’ve had tv packages that largely included pretty much everything. I started out many years ago with Directv, and had one of their packages that pretty much included all the normal channels and the premium channels. Then my neighbor went and planted willow trees along the edge of his property. Fast forward a few years, and suddenly I found myself having to switch to Comcast. This actually started saving me some money, because I’d already switched to using Comcast for their cable internet instead of the dsl service I’d had before. So again, went with one of their higher packages that had everything. Which was fine, for about the first two years. Then the end of that contract hit, and I found myself staring at a massive increase in the monthly costs. So I reassessed what I needed, and dropped back a ways, and ended up with their HD Preferred 220+ Channels with Blast internet, along with the X1 dvr. After a few months of that, I started looking at things, and realized that I’m still paying about $169 a month for TV plus the internet. I then went to a slightly larger TV, and that only emphasized just how poor of a signal Comcast is putting out on their HD channels these days. That was kinda the last straw for me, and set me off on the path of wondering what my options would be. From experimenting, I was finding I could stream various channels like ESPN and get a better image quality with the streamed version that I was getting from Comcast. Doesn’t quite seem like that’s all that reasonable.
Adventures in cord cutting (or at least sorta cord cutting)
So, like a lot of people out there, I’ve been reaching a point of frustration with the state of my television service. Prices keep getting higher and higher, and quite honestly, the quality of the product that Comcast is pushing out these days is far from adequate. Doing comparisons with streamed versions of channels and what Comcast is pushing out, it’s pretty obvious that we’ve reached the point where the streamed version of the channels. Couple that with some of the price increases in the service lately, and I’m starting to wonder just why I’m paying what I’m paying.
I actually started this exploration about a month ago or so, and my goal is by June 15th we’re going to have dropped Comcast as the tv provider and replace it with some combination of online services. We’re largely stuck with Comcast as the only true viable high speed internet in my area, which ultimately is going to be bad – the internet only price for Comcast is high enough that it’s going to eat into any savings this project might have.
My future posts will start detailing what I’ve been exploring, and what my opinions are of those options.
Anastasia
So, our latest musical this year was Anastasia. The story revolves around a couple of cons trying to pass off a young girl as the rumored possible survivor of the massacre of the Romanov family in the hopes of getting a reward for delivering her to the Dowager Empress in Paris (with the added benefit that it would get them out of St. Petersburg/Leningrad). And oh, of course, the girl they ultimately decide to train as Anastasia has amnesia, doesn’t remember her past, and indeed, might actually be the real Anastasia that they’re trying to pass her off. And naturally there’s some element of danger involved, because the Bolsheviks have heard the rumor, and needless to say aren’t happy with the idea that Anastasia might have survived.
The whole musical is fairly formulaic, and by the time the second act starts most people can probably make a pretty reasonable guess on how events are going to play out. That’s not necessarily a bad thing, but there is something of a feel that someone putting this together had a checklist of “Things That Must Be In a Musical” that they were working from.
I kinda feel that for this performance, a number of the supporting cast really helped prop up the show. I didn’t personally find either of the two main leads (either Anya/Anastasia or Dmitry) to be all that strong, although I’ll waffle on that somewhat with Anya. I thought the Bolshevik Gleb and the Countess Lily were high points in the cast. The ensemble cast was pretty decent, and shined during a section where Swan Lake is performed.
The set design I thought was very good. It made extensive use of projection for background images but framed things in a way that it wasn’t necessarily being thrown in your face as projection. Many of the background images had a fair amount of depth to them, making it even less obvious that it was projection. It’s worth noting that the Broadway production won a couple of awards for Outstanding Projection Design.
There’s also a memorable scene (really one of the few memorable scenes in my opinion) shortly before the end of the first act that takes place on a train car, and involves a set piece that’s made from a frame of the train car that reorients itself as the action takes place (with the background projection taking on an appropriate viewpoint too).
Overall it’s an ok musical. It’s not likely to stand out as anyone’s favorite, but it’s probably not going to be the worst one you ever see either (I’ve certainly got a few candidates that I’d put in that category). It’s a bit uneven in places, and at times the plot seems to have problems making up its mind where it’s really going and probably rambles on a little longer than it really should. Having seen it once, I doubt I’d go out of my way to see it again, but if the right situation came up I wouldn’t be opposed to seeing it again either.
Wharton Center show reviews
Ok, the last year or two my wife and I have been subscribing to the Broadway series at the Wharton Center on campus to go to some of the shows. This year I’ve decided that I’d post my thoughts on what we see, in the unlikely event that anyone out there cares what I think about the shows.
For this year, we have the following shows on slate:
- School of Rock
- Love Never Dies
- Fiddler on the Roof
- Anastasia
- Miss Saigon
- Hamilton
On top of that, we picked up the following other shows for this season:
- Dustbowl Revival
- Broadways Next Hit Musical
- Soweto Gospel Choir
- Ukelele Orchestra of Great Britain
Of those, a couple are shows I won’t attend, my wife is going with other people – Hamilton and Soweto Gospel Choir. Neither of them particular interested me (I know, I’m probably the only person on the planet that doesn’t want to see Hamilton, but I have a couple of reasons why, not the least of which is that I’m not particularly a fan of spoken word as an art form, and what little I’ve seen makes me think I’d go nuts listening to a whole show of it).
None of these are shows that I’ve seen before, with the somewhat exception of Fiddler on the Roof. For that, I’ve seen the movie version of it, sorta. I’m pretty convinced that I’ve never seen more than the first two thirds of it. So, it’ll be interesting to see how these turn out.
Receiver
Next, the receiver gets added. I was starting to have problems finding a good spot to put things, so I decided that this would go on the bottom. Not necessarily ideal, especially if I fly from somewhere where the grass is wet. The feet on the legs do help lift it off the ground some though. The antenna I routed up along the side of the fuselage to stick straight up. I ended up using a cable-tie and some shrink wrap tubing to give it some rigidity, and then zip-tied it in place to the top plate of the quad.

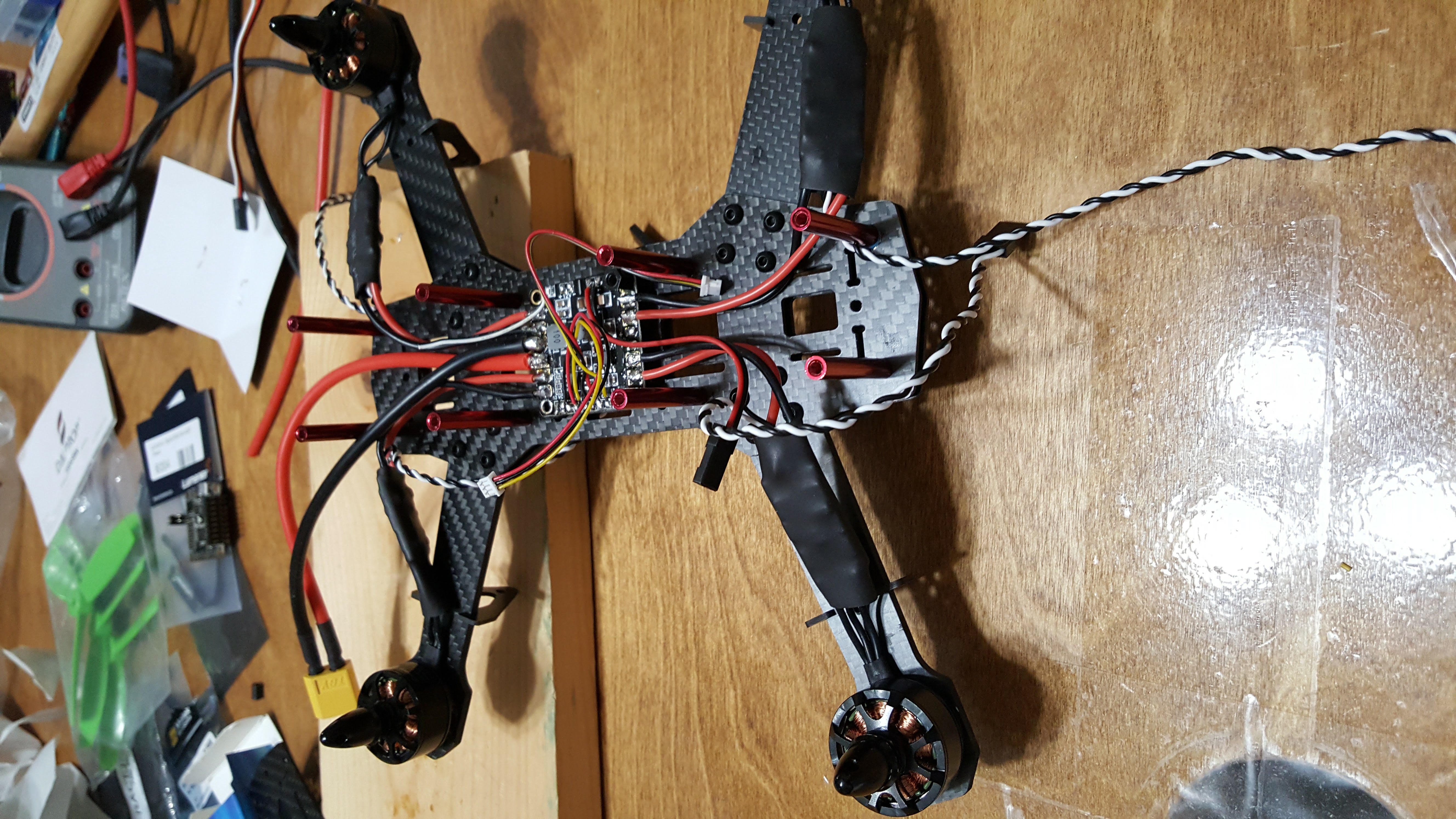
Stacking the boards
Time for more assembly. The power distribution board had already been mounted in a previous step, so next I mount the led power distribution board.
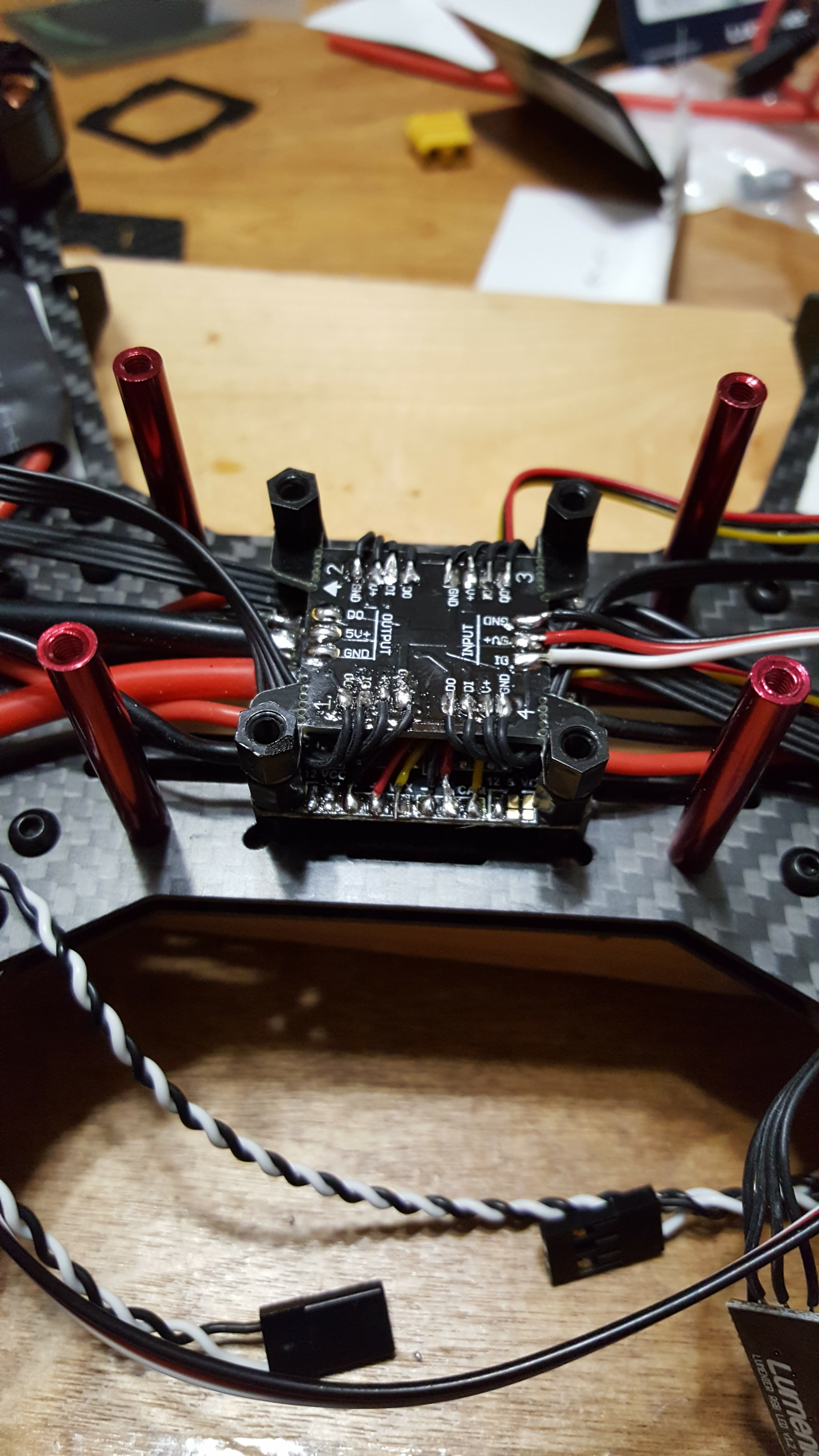
More stand-offs on top of that, and then the flight controller board.
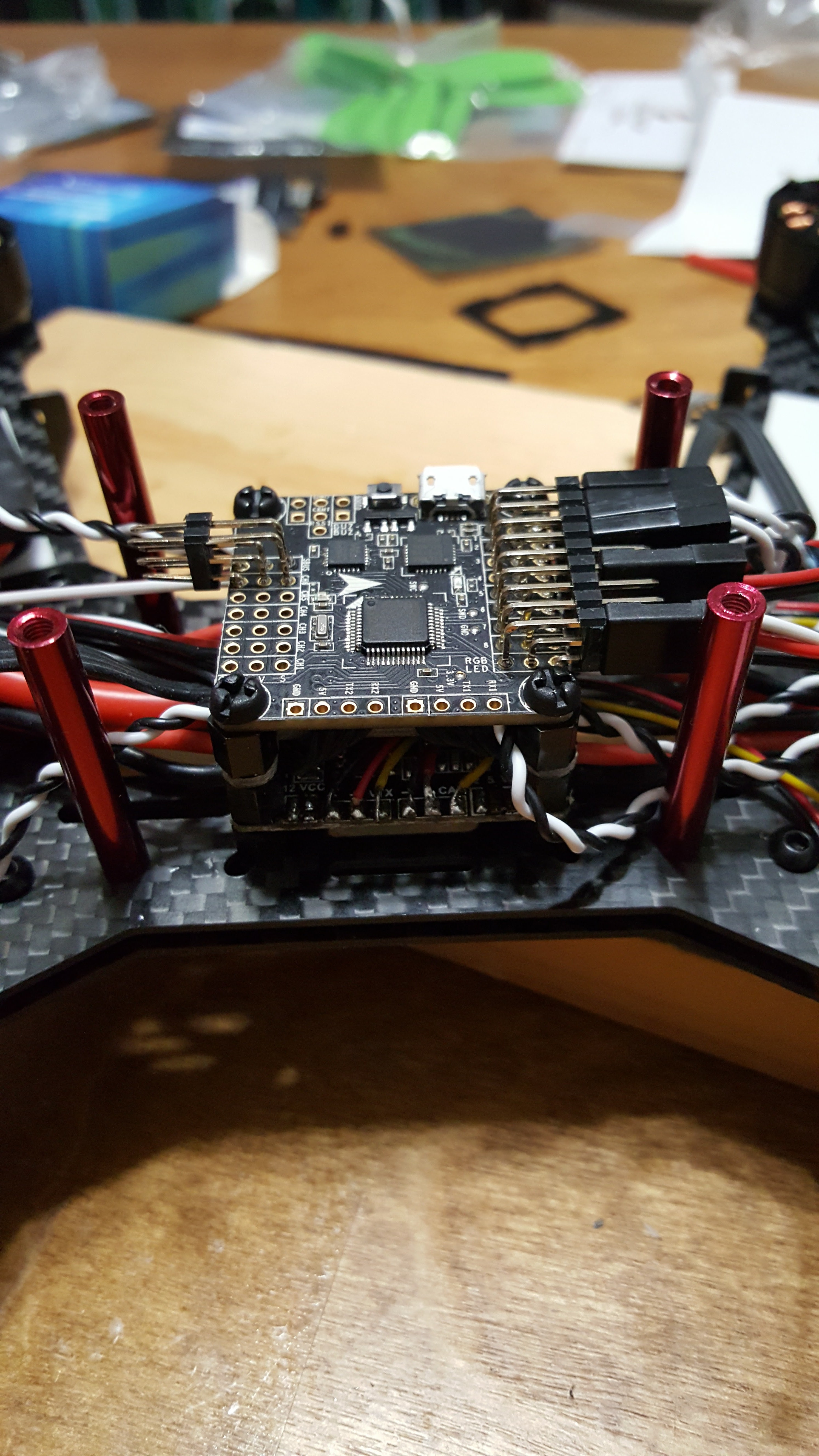
The wires from the various esc’s are plugged into the board into the above photo. What you can’t see is that one of them is wired backwards, something I don’t figure out until later.
Finally, apply some power, and wow are those leds bright.

LEDs
The next step was to add some led’s to the quad. I bought this set of leds from getfpv.com. They included a power distribution board, 4 sets of boards designed to be mounted on the arms that each have 4 leds on them, and a panel for the back of the quad with a 3×3 array of led’s. The back panel also has the logic in it to allow for programming color sequences into the led’s. That panel required soldering another set of pin headers onto it (which didn’t go that smoothly). And then the wires from the power distribution boards to the arm leds all had to be soldered in place, 4 wires at each end. These wires were a real pain in the neck to get soldered properly. The wires are very fine, and the solder pads that you have to connect them to are small and close together. Even with my fine tip soldering iron I had all sorts of trouble getting this done without screwing things up. Unfortunately, my pictures of this phase pretty much turned out to be pretty blurry. This is the best of the lot, showing the arm panels wired to the distribution board, but even it’s pretty blurry.
Vertical support posts
If you’ll recall, I mentioned that the directions weren’t real clear on which pieces would go through both of the bottom panels and which wouldn’t. I next went to add the vertical posts that the top plate mounts to and realized that the screws for these only go through the top layer of the bottom. If you tried to run it through both, the screws would be too short, and you’d actually put some bending pressure on the bottom plates which wouldn’t be good. So, had to remove the bottom layer of the bottom (and all the arms), and then mount the posts and put everything back together again.