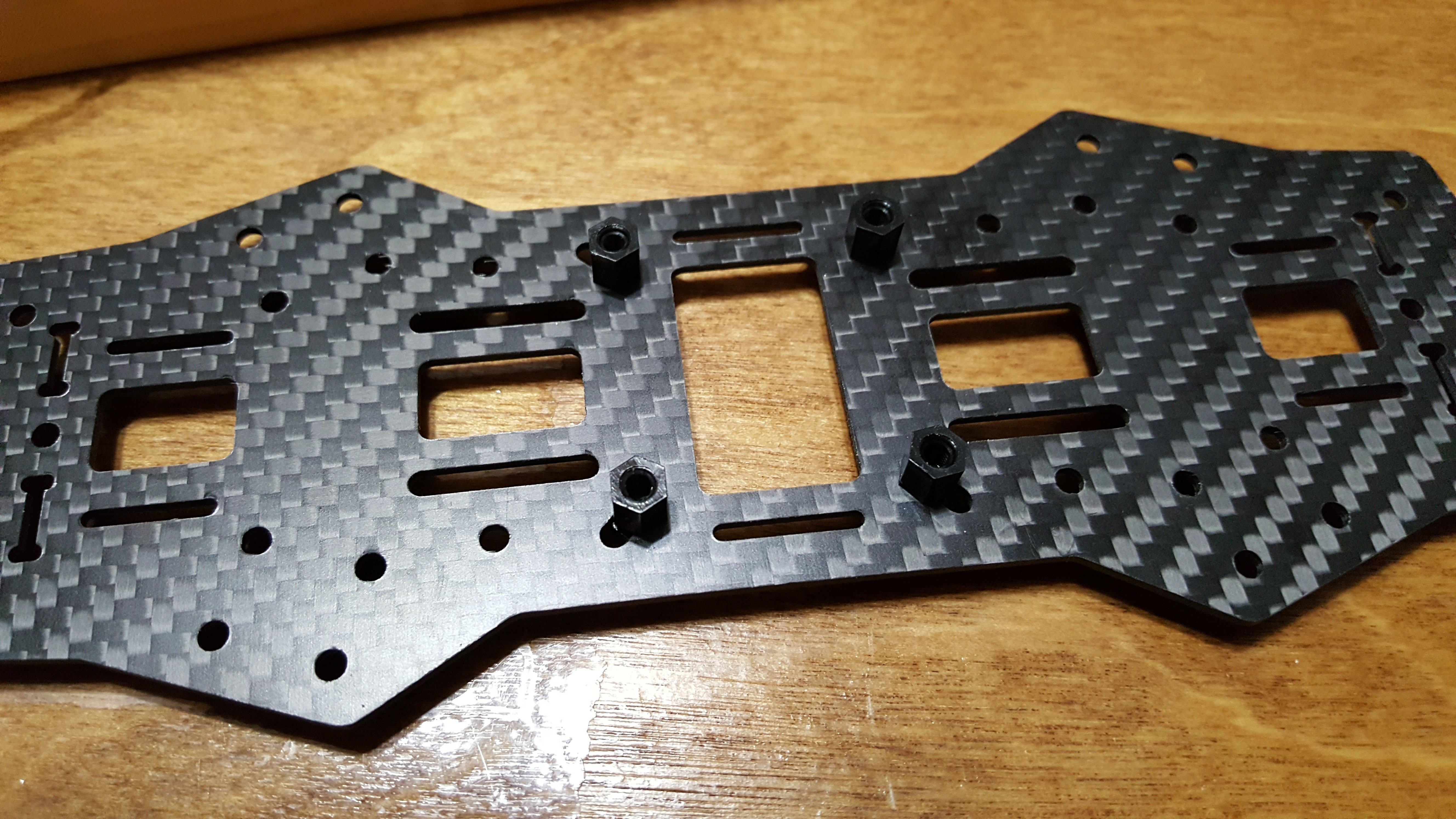
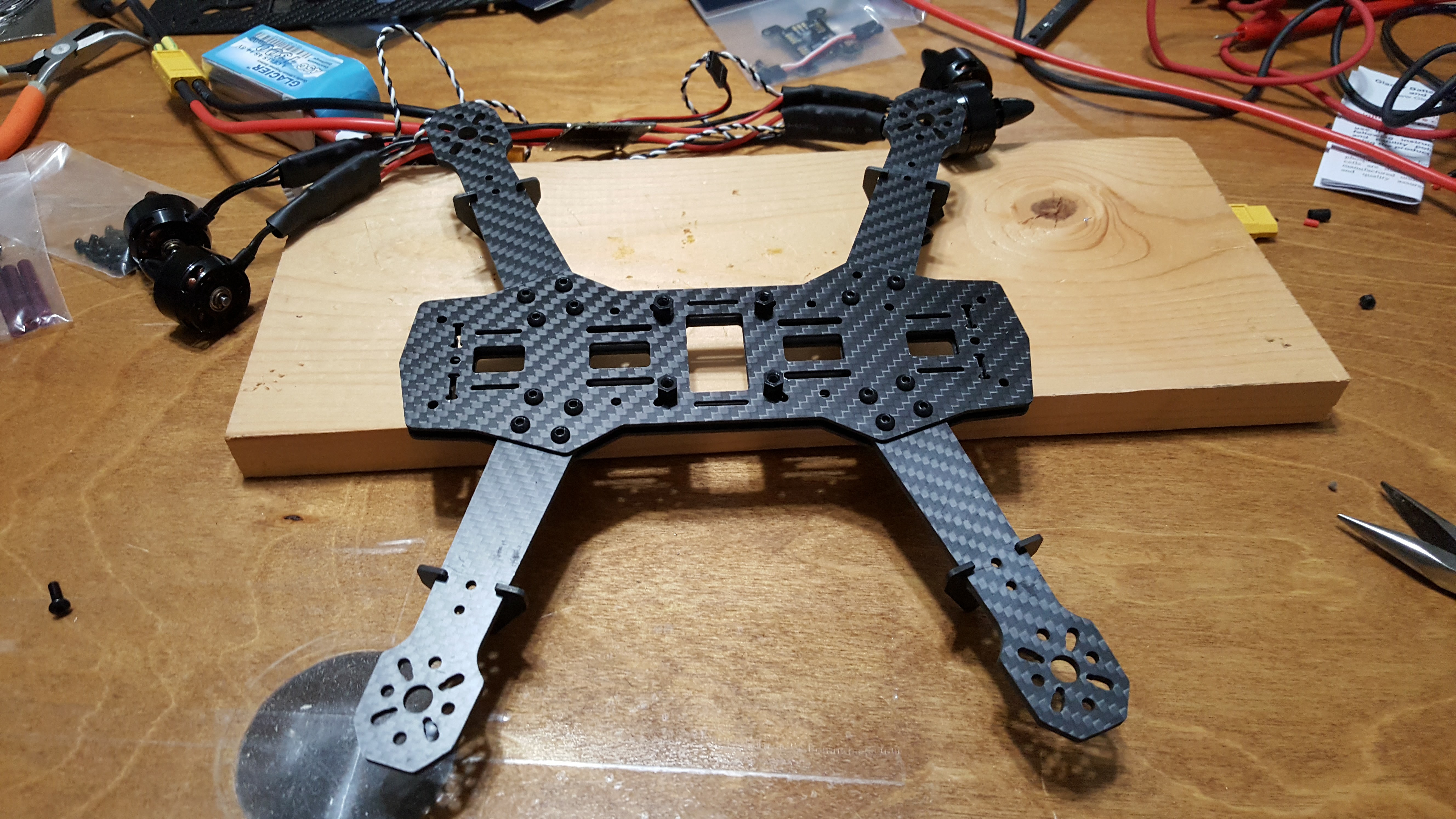
Now that the electronics are largely sorted out, it’s time to start putting everything together. For the frame, I purchased a 250 sized carbon fiber frame off of amazon. It’s probably a clone of the various QAV250 models. Price was really good, and from what I can tell the components all look to be pretty decent. The one thing lacking? The instructions. To say they were lacking would be somewhat charitable. There was one page that had some somewhat english instructions on one side, and the other in what was probably chinese. The real issue was that the diagram wasn’t real clear on exactly which pieces went through multiple layers and which didn’t.
First, we start off with the bottom, and mount the M3 sized nylon standoffs through. It’s important to do this part first, because at least in my case, these standoffs only go through the first layer of the bottom, and the nuts aren’t very accessible after the bottom is completely assembled.
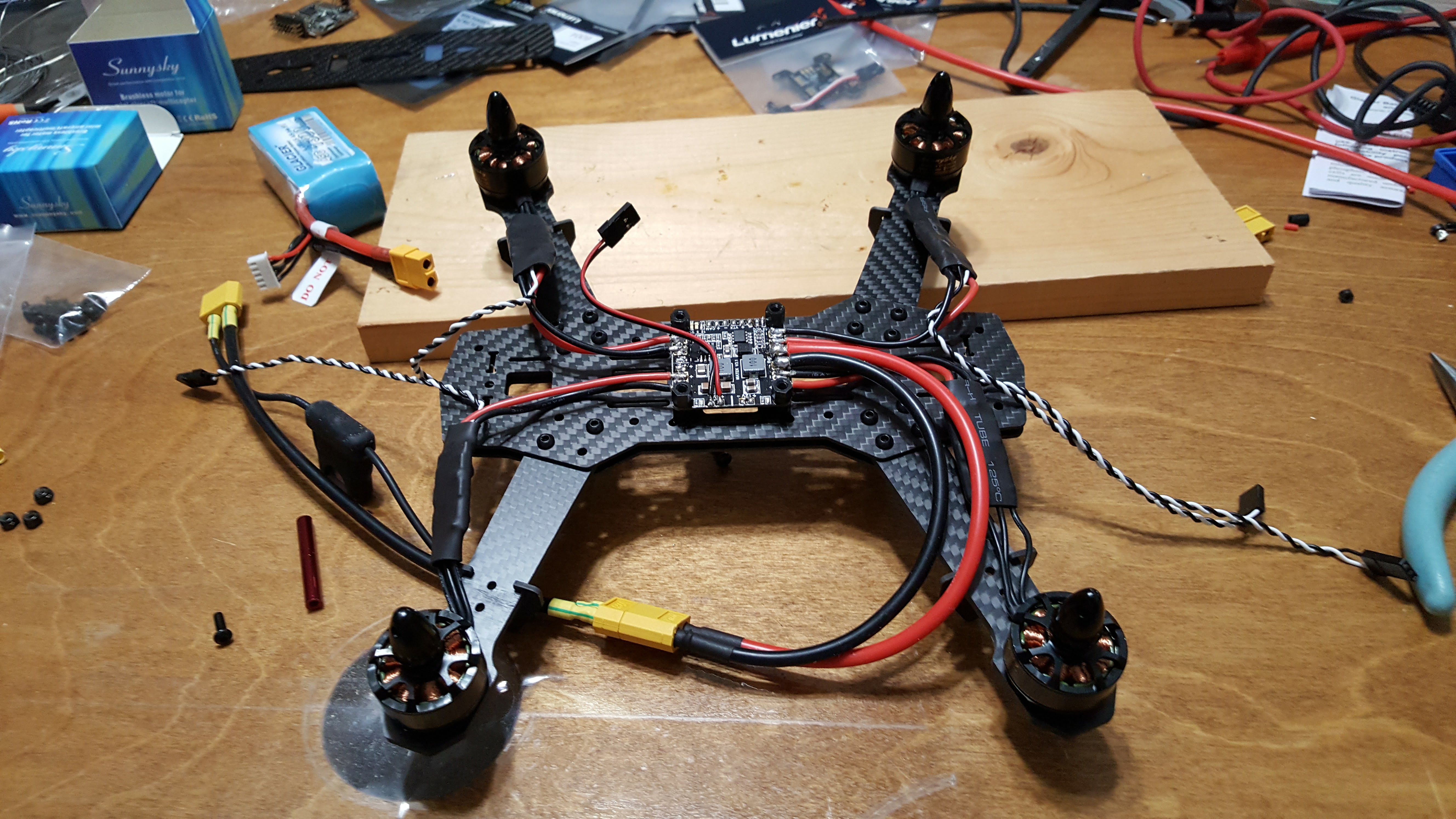
Next, the arms for the motors are mounted between the top bottom panel and the bottom bottom panel.
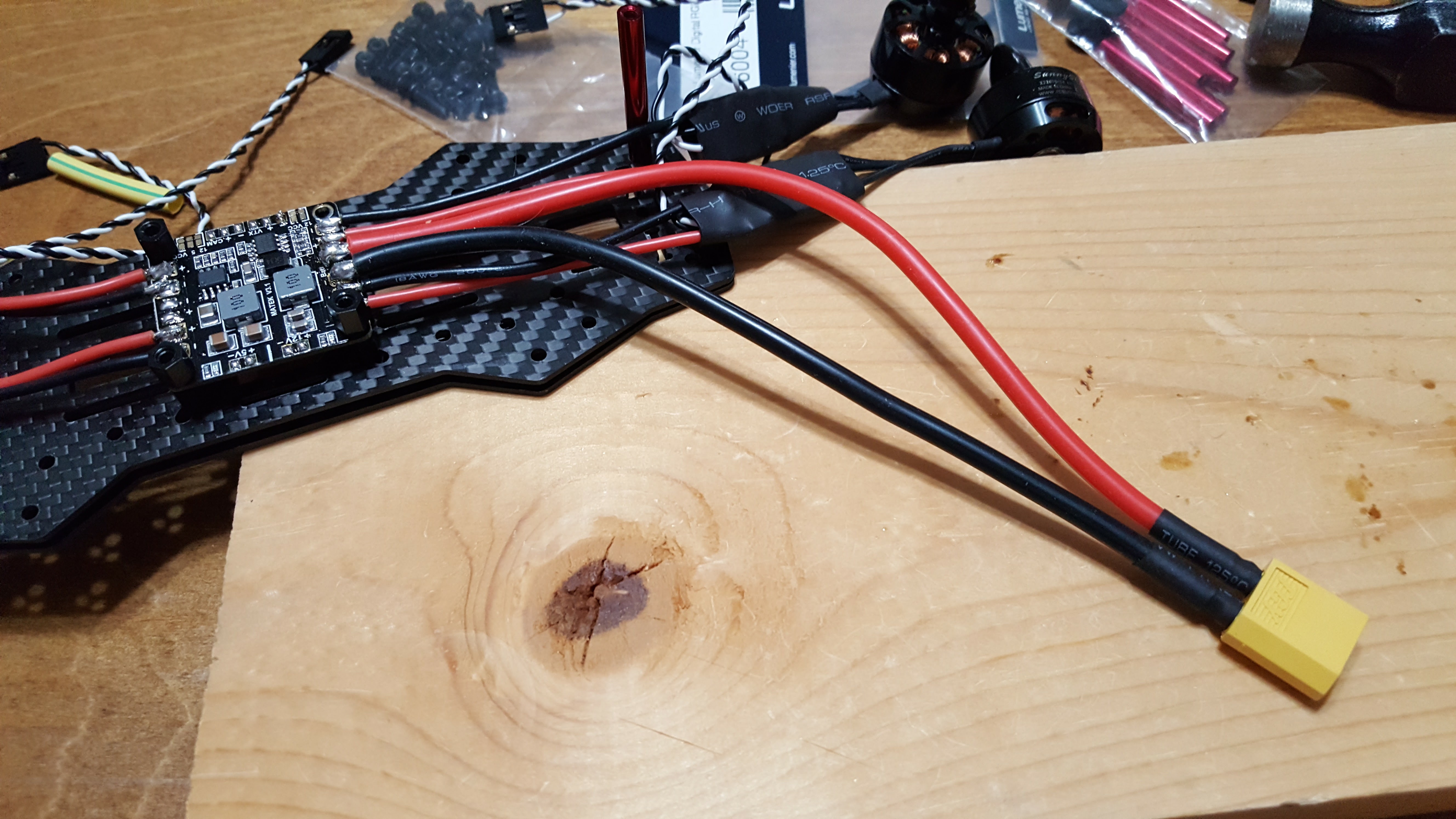
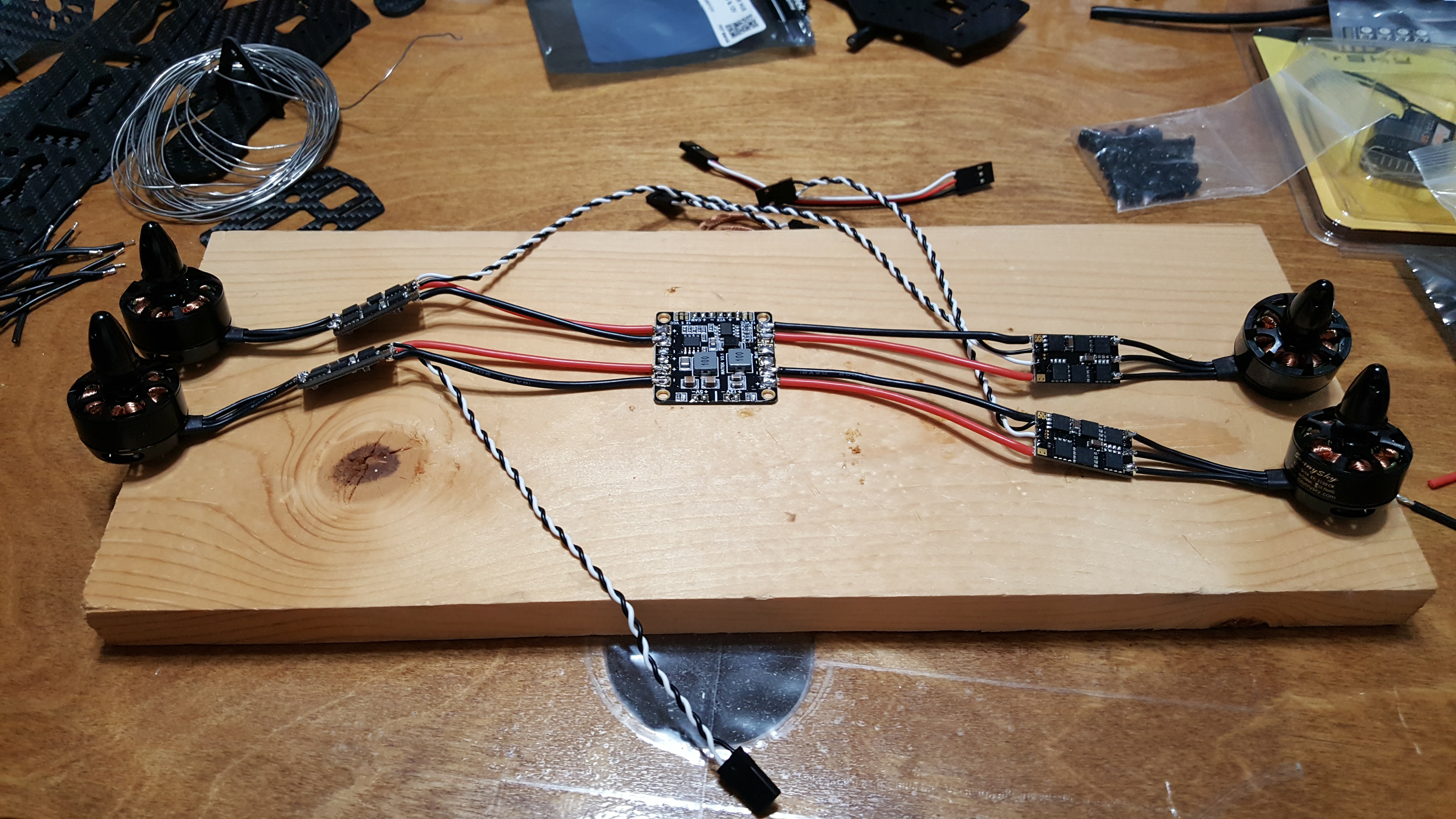
Then we can install the power distribution board, and the motors can be mounted to the arms. Another set of M3 standoffs go on top of the power distribution board to be ready for the next board.