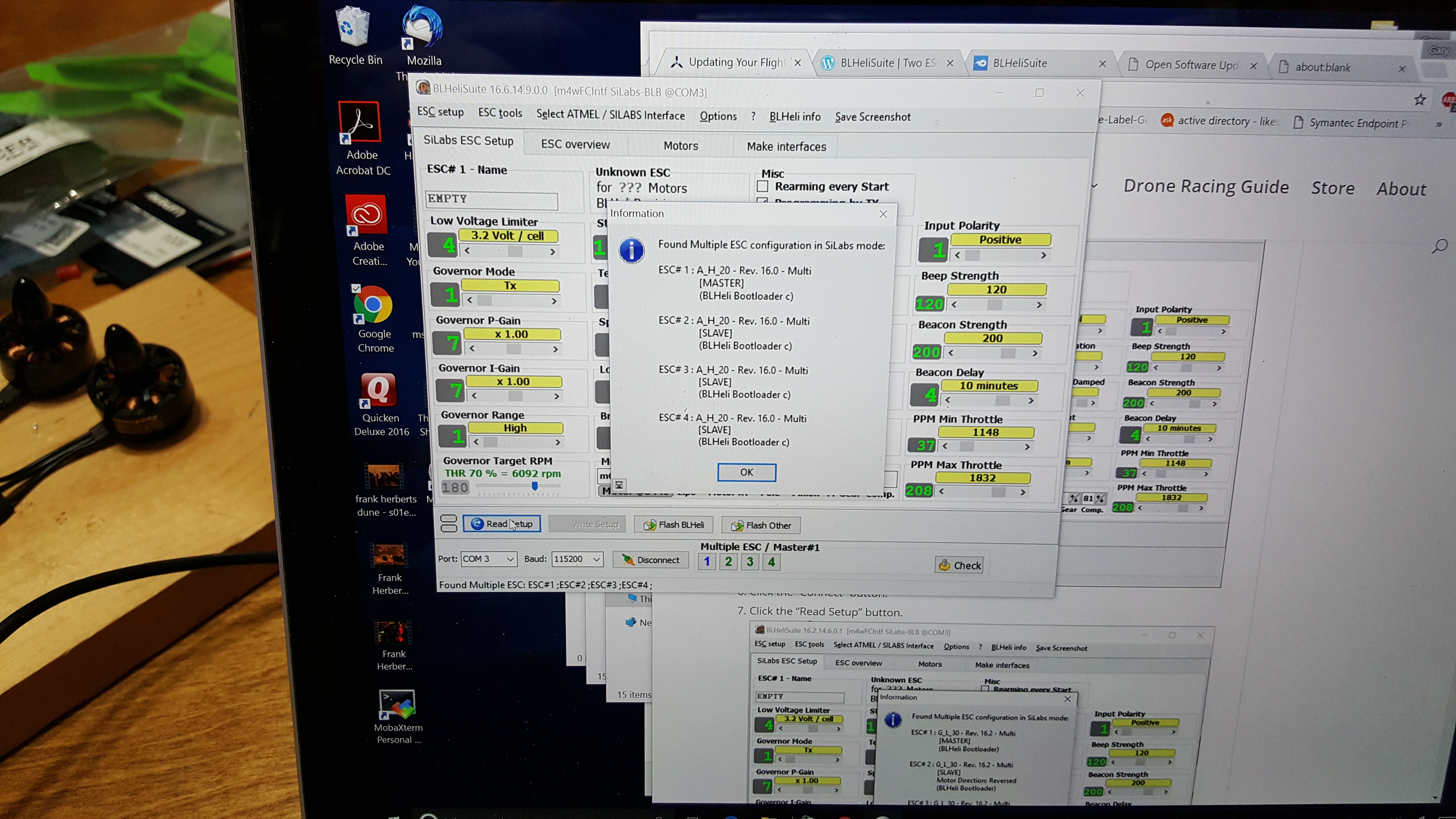
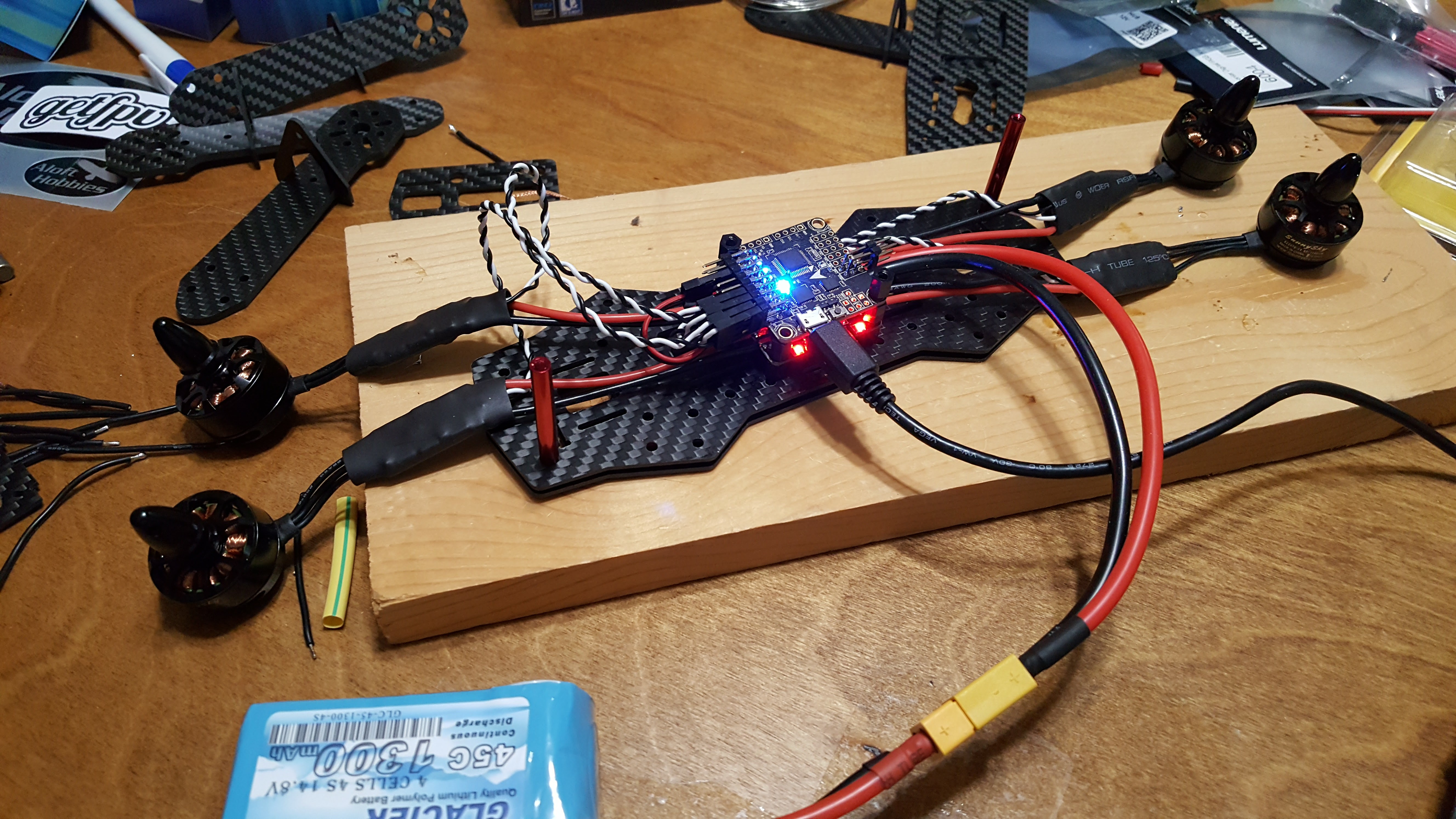
Ok, so first I installed the BL Heli Suite software on the computer, and then with all the esc’s connected to the flight controller, connected the software to the quad. As you can see, when I read the setup it found all 4 of the esc units, which is good.

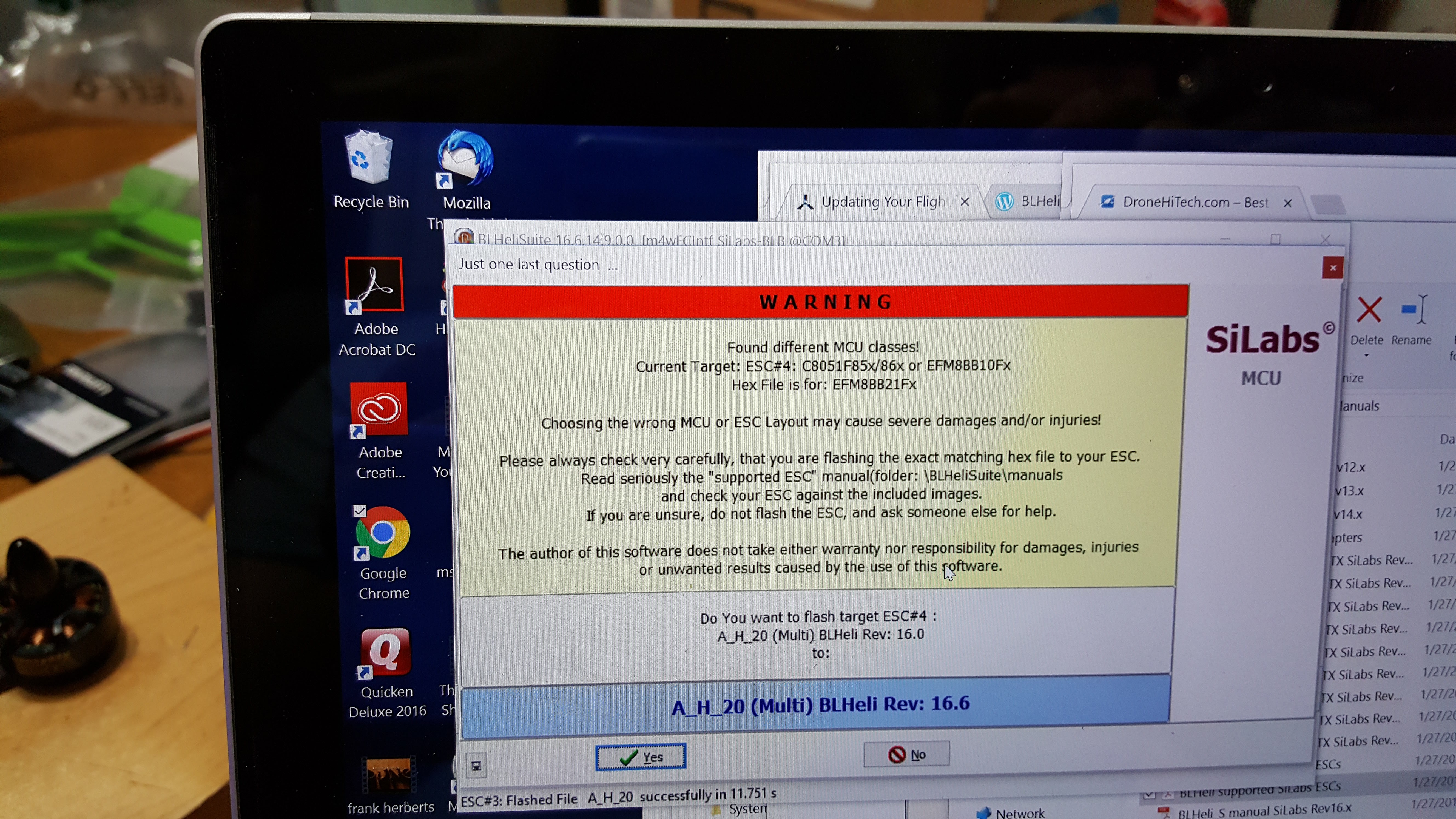
This is where things were starting to get confusing. My esc’s are ZTW Polaris 25A BLHeli_S Esc’s. From what I could determine, these esc’s use the A-H-20 firmware. By default, it wasn’t matching the A-H-20 when it was giving me a list of firmwares to select, and I had to turn off auto-matching. Then, once I selected the correct firmware, I got this error message that was somewhat ominous. After doing some more research, I was pretty confident that I was going in the right direction, so I hit ignore. Which yielded an even more ominous warning:

So that made me go back digging through all I could find as a reference. However, I was still positive that I had the right firmware selected, so ultimately ended up flashing with the A-H-20 firmware. Everything went well with that, and I was able to eventually configure the motor directions (which I apparently have no photos of), and then test that they would spin up. So while it turned out to be a scary step with all the warnings, ultimately it worked out.