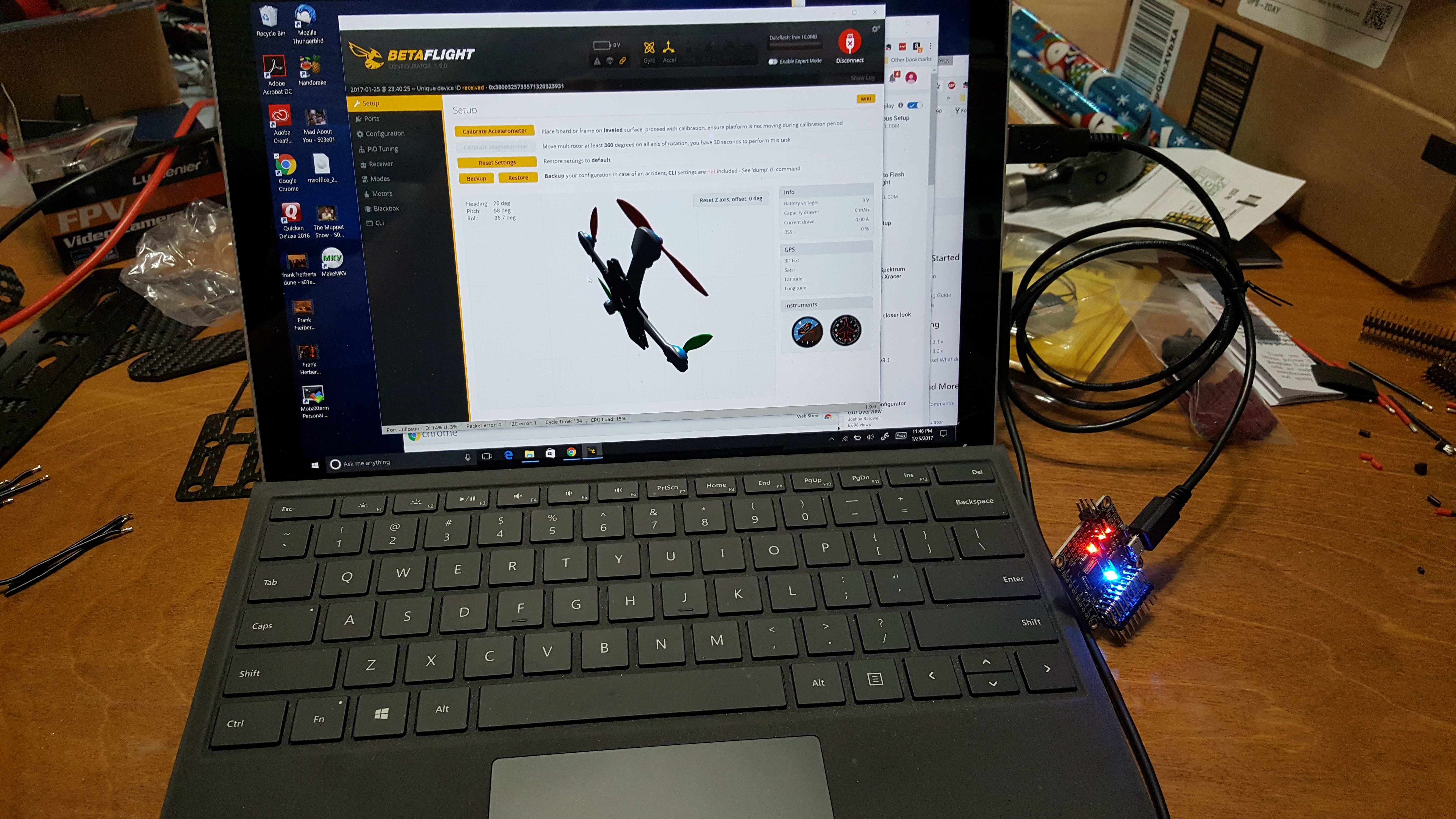
Ok, so the first time anything had any power through it. I installed the betaflight software on my laptop, and connected the flight controller to the laptop. Things worked pretty well and the flight controller was recognized. I then went ahead and flashed the update to the controller so that it was at the current version of betaflight. Maybe I’m easily amused, but I did find it kinda neat that on the page being shown, as I’d move the flight controller around, the image of the quad copter would also move in unison with the flight controller. At least that means that the various sensors appear to all be working.